
HK STEM CLUB
DFRobot HuskyLens (普通版 / Pro) 人工智能攝像頭模組
DFRobot HuskyLens (普通版 / Pro) 人工智能攝像頭模組
Regular price
HK$408.00
Regular price
Sale price
HK$408.00
Unit price
per
Couldn't load pickup availability

DFRobot Gravity: HuskyLens - 易於使用的 AI 機器視覺傳感器概述
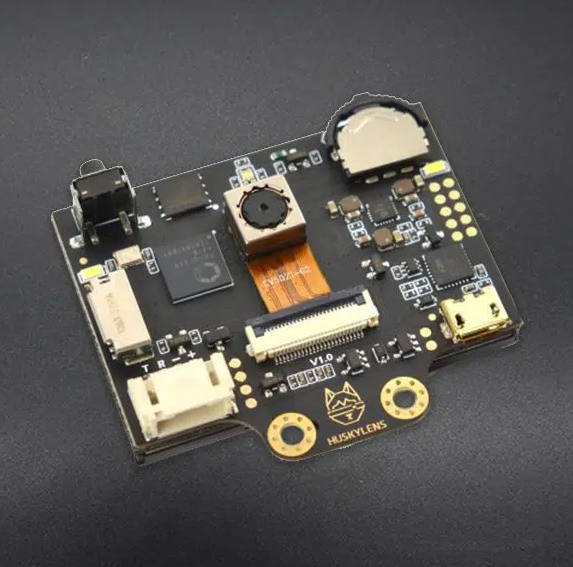
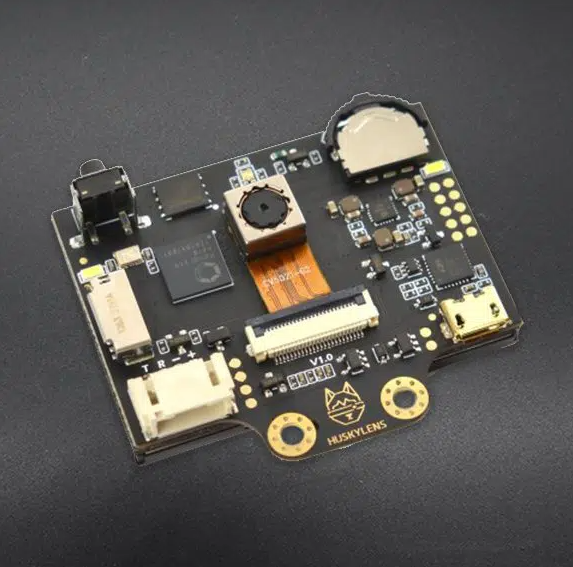
HUSKYLENS 人工智慧攝像頭模組 是一款簡單易用的人工智慧視覺感測器,採用新一代AI晶片,內置機器學習技術,具有人臉識別、物體識別、物體追蹤、顏色識別、巡線、二維碼標籤識別6大功能。
- 支援 UART / I2C 介面 (可直接接駁 Arduino 開發板, Micro:bit 建議配合支援I2C 介面的擴展板 [例如: Robot:Bit] 使用);
- 內置AI 訓練功能,一個按鍵即可完成識別人臉和物體訓練,擺脫繁瑣的訓練和複雜的視覺演算法,讓你更加專注於項目的構思和實現;
- 搭載 2寸 IPS 屏幕。因此,您無需在參數調整中使用 PC。即時預覽AI辨識結果;
- 採用新一代專用AI芯片Kendryte K210。這種特殊的AI芯片在運行神經網絡算法時的性能比STM32H743快1000倍。憑藉這些出色的性能,它甚至能夠捕捉快速移動的物體;
- 借助 HuskyLens,您的項目有了與您或環境交互的新方式,例如交互式手勢控制、自主機器人、智能門禁控制和交互式玩具。有很多新的應用程序供您探索;
-
HuskyLens 可以檢測和跟踪線條。跟踪線條並不是什麼新鮮事物,在這種情況下有很多優秀的方法和算法。然而,它們中的大多數都需要繁瑣的參數調整。這一次,HuskyLens 提供了一種新的行跟踪方式:只需單擊按鈕,它就會開始學習和跟踪新行。
讓我們一起享受使用 HuskyLens 製作的樂趣吧!
Micro:Bit Huskylens Library
https://makecode.microbit.org/pkg/DFRobot/pxt-DFRobot_HuskyLens
規格:
- 處理器:Kendryte K210
- 圖像傳感器:OV2640(2.0Megapixel Camera)
- 供電電壓:3.3~5.0V
- 電流消耗(TYP):320mA@3.3V ,230mA@5.0V (人臉識別模式;80%背光亮度;關閉補光燈)
- 連接接口:UART、I2C
- 顯示屏:2.0英寸IPS屏,320*240分辨率
- 內置算法:人臉識別、物體跟踪、物體識別、線條跟踪、顏色識別、標籤識別
- 尺寸:52mm * 44.5mm / 2.05 x 1.75inch
| 型號 | HuskyLens | Huskylens Pro |
| SKU | SEN0305 | SEN0336 |
| 相機像素 | OV2640(200W像素) | OV5640(500W像素) |
| 變焦支持 | 否 | 數碼變焦 |
| 通信功能 | 保持感測器方式,使用UART、I2C通信:USB控制及調用鏡頭結果和指令 | 保持感測器方式,使用UART、I2C通信:USB控制及調用鏡頭結果和指令,增加相機USB圖傳至PC功能,實施圖傳收集數據 |
| 螢幕功能 | 自定義顯示識別結果;
自定義位置顯示文字; |
自定義顯示識別結果;
自定義位置顯示文字; |
| 數據儲存功能 | 拍照本地SD卡存檔;
截圖本地SD卡存檔; |
拍照本地SD卡存檔;
截圖本地SD卡存檔; |
| 可實現AI功能 | 人臉識別;人臉追蹤;物體追蹤;巡線追蹤;特定標籤識別;自定義物體識別;顏色識別;
色塊計數;物體分類; |
人臉識別;人臉追蹤;物體追蹤;巡線追蹤;特定標籤識別;自定義物體識別;顏色識別;
色塊計數;物體分類;條形碼識別;二維碼識別 |
| 板載AI功能 | KNN機器學習物體分類;
人臉識別模型; 20分類物體分別; |
KNN機器學習物體分類;
人臉識別模型; 20分類物體分別; |
| 數據處理 | 鏡頭本地數據處理 | 鏡頭本地數據處理;
連接PC端可視化數據篩選; 連接PC端可視化數據處理; |
| 模型訓練功能 | 鏡頭本地手動訓練;
程序控制鏡頭訓練; |
鏡頭本地手動訓練;
程序控制鏡頭訓練; PC端編程控制鏡頭訓練; 模型PC端訓練; |
| 模型儲存與使用 | 保存訓練後的模型到本地;
運行本地訓練好的模型; |
保存訓練後的模型到本地;
運行本地訓練好的模型; 運行PC端導入的模型; |
| 總結 | 主打DIY,打造AI鏡頭應用快速上手,具有易懂易用的UI介面設計,幫助實現大部分AI功能應用。 | 針對教育市場,既可以讓學生和老師快速體驗和應用AI,又打通圖形化編程,令AI變得可視化,減輕教學的負擔。 |
官方資料 及 教學:
https://wiki.dfrobot.com/HUSKYLENS_V1.0_SKU_SEN0305_SEN0336